同步(基础)
并发的挑战
并发程序的核心挑战在于其执行顺序的不确定性。即使是很简单的代码片段,在多线程环境下,由于线程调度和指令交错执行,可能产生多种不同的最终状态。
1 | // 共享变量 |
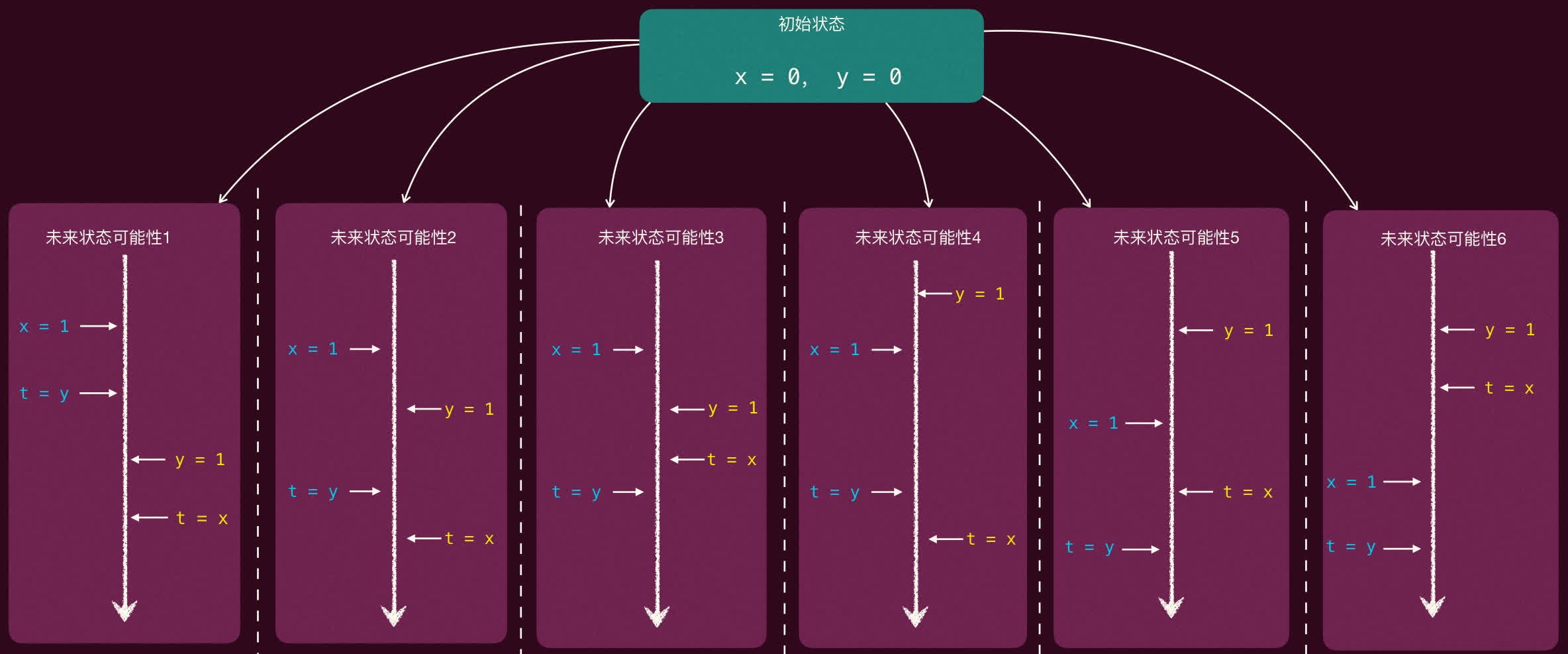
这种不确定性使得我们难以枚举和预测所有可能的状态,尤其是当线程数量增多时。
为何需要同步
并发程序中,并非所有可能的状态都是我们期望的。
- 不期望的状态:例如,多个线程同时进入临界区,破坏数据一致性。
- 期望的状态:例如,主线程调用
pthread_join等待子线程结束后才能继续执行。
为了避免不期望的状态,并确保程序能达到期望的状态,我们需要对线程的执行进行控制。这种控制通常要求线程:
- 不能太快:在某个条件满足之前必须等待。例如,线程 B 必须等待线程 A 完成某项操作后才能继续。
- 不能太慢:一旦某个条件满足,等待的线程应该能够继续执行(避免死锁或饥饿)。
同步
同步(Synchronization)是指控制并发进程(或线程)的执行,使得它们在变化过程中保持一定的相对关系,以协调它们对共享资源的访问或保证特定的执行顺序。
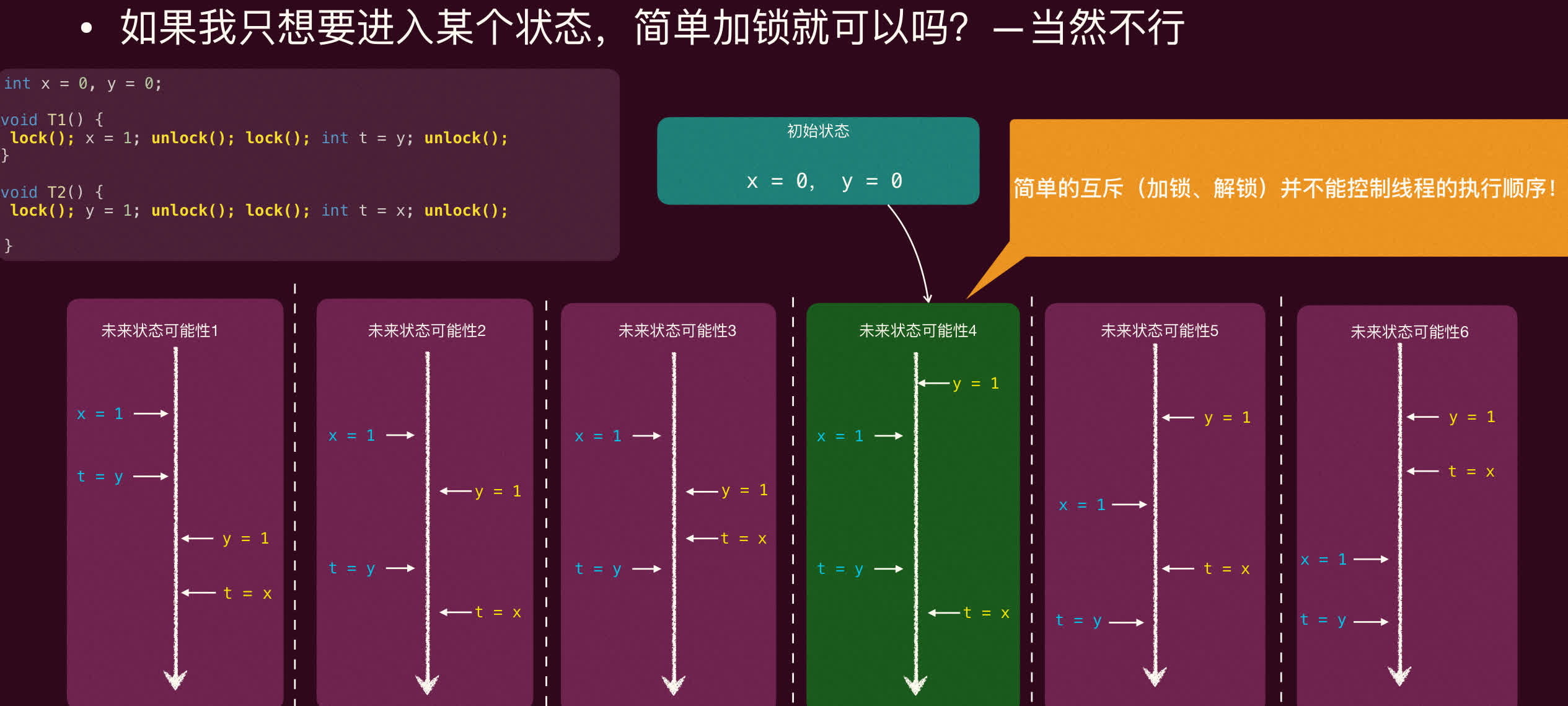
互斥也是同步的一种特殊形式,它保证了在任意时刻只有一个线程能访问临界区。但同步的概念更广泛,还包括了执行顺序的协调。
简单的互斥锁(如 lock()/unlock())虽然能保证临界区内的原子性,但无法直接控制线程间的执行顺序。
经典同步问题:生产者-消费者
生产者-消费者问题(Producer-Consumer Problem)是并发领域一个非常经典且具有代表性的同步问题,由 Edsger Dijkstra 首次提出。
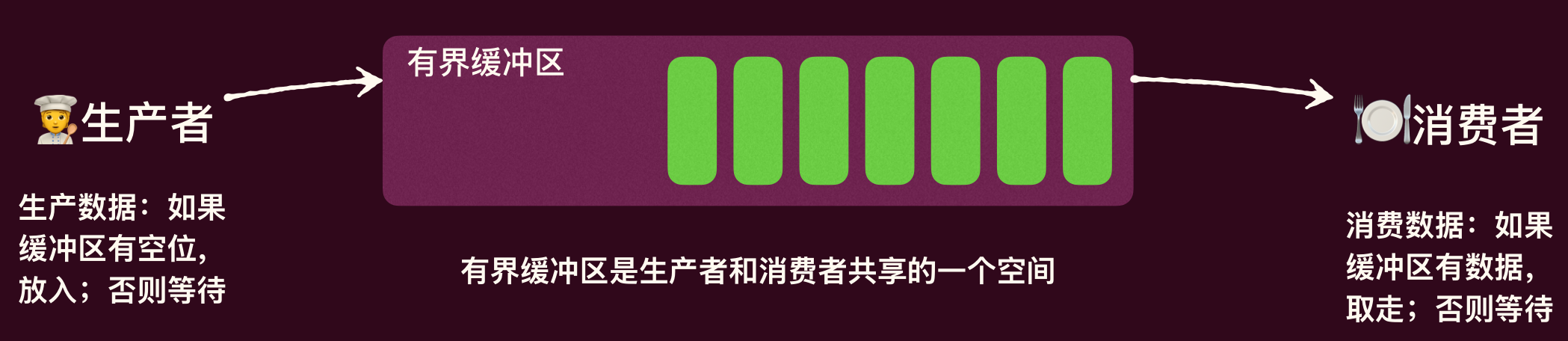
- 场景:一个或多个生产者(Producer)线程和一个或多个消费者(Consumer)线程共享一个固定大小的有界缓冲区(Bounded Buffer)。
- 生产者任务:生成数据项,如果缓冲区未满,则将数据放入缓冲区;如果缓冲区已满,则必须等待。
- 消费者任务:从缓冲区取走数据项,如果缓冲区非空,则取出数据进行消费;如果缓冲区为空,则必须等待。
graph LR
P(生产者) -- 生产数据 --> B{有界缓冲区};
B -- 消费数据 --> C(消费者);
subgraph 约束条件
direction LR
P -- 缓冲区满? --> W1[等待];
C -- 缓冲区空? --> W2[等待];
end
style P fill:#f9f,stroke:#333,stroke-width:2px
style C fill:#9cf,stroke:#333,stroke-width:2px
style B fill:#ccf,stroke:#333,stroke-width:2px
style W1 fill:#f99,stroke:#333,stroke-width:1px
style W2 fill:#f99,stroke:#333,stroke-width:1px简化模型:打印括号
为了更清晰地理解同步机制,我们将问题简化为打印括号:
- 生产者:打印左括号
(,相当于向缓冲区放入一个元素。 - 消费者:打印右括号
),相当于从缓冲区取出一个元素。 - 缓冲区:用括号的嵌套深度(
depth)来表示,容量为n。 - 合法序列:任何时刻,括号深度
0 <= depth <= n。
1 | void produce() { printf("("); } |
非法序列示例(假设缓冲区容量为 3)
(())):非法,消费时depth变为 -1(缓冲区为空无法消费)。(((()))):非法,生产第四个(时depth变为 4(超出缓冲区容量)。
同步目标
我们需要确保:
- 生产者在
depth < n时才能打印(。 - 消费者在
depth > 0时才能打印)。
这本质上是要求线程在特定条件满足时才能执行,即实现 wait_until 语义:
1 | // 伪代码 |
问题在于如何高效且正确地实现 wait_until。
尝试与陷阱
-
无锁尝试(错误)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15// 错误:竞态条件
int n; // 容量
int depth = 0; // 当前深度
void produce() {
while(1) {
retry:
// 检查和修改 depth 不是原子操作
int ready = (depth < n);
if (!ready) goto retry; // 自旋等待
printf("(");
depth++; // 可能与其他线程冲突
}
}
// consume 类似- 问题:对共享变量
depth的读写存在竞态条件,多个线程可能同时读到旧值并进行修改,导致depth值不正确,违背安全性。
- 问题:对共享变量
-
加锁尝试 1(错误)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21// 错误:条件检查与操作分离
mutex_t lk;
int n, depth = 0;
void produce() {
while(1) {
retry:
mutex_lock(&lk);
int ready = (depth < n);
mutex_unlock(&lk); // 释放锁
// 在 unlock 和 if 之间,depth 可能已被其他线程修改!
if (!ready) goto retry; // 条件可能已失效
mutex_lock(&lk);
printf("(");
depth++;
mutex_unlock(&lk);
}
}
// consume 类似- 问题:在检查条件(
depth < n)和根据条件执行操作(printf,depth++)之间释放了锁。这期间,其他线程可能修改depth,使得之前检查的条件失效。
- 问题:在检查条件(
-
加锁尝试 2(正确但低效)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20// 正确但低效:忙等待
mutex_t lk;
int n, depth = 0;
void produce() {
while(1) {
retry:
mutex_lock(&lk);
int ready = (depth < n);
if (!ready) {
mutex_unlock(&lk);
goto retry; // 持有锁时条件不满足,释放锁并重试 (忙等待)
}
// 条件满足,持有锁执行操作
printf("(");
depth++;
mutex_unlock(&lk);
}
}
// consume 类似- 问题:虽然保证了正确性(检查和操作都在锁的保护下),但在条件不满足时,线程会不断地
lock -> check -> unlock -> retry,形成忙等待或自旋,浪费 CPU 资源。
- 问题:虽然保证了正确性(检查和操作都在锁的保护下),但在条件不满足时,线程会不断地
-
阻塞尝试(潜在问题:唤醒丢失)
为了避免忙等待,我们希望线程在条件不满足时阻塞,让出 CPU,并在条件可能满足时被唤醒。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40// 潜在问题:唤醒丢失(Lost Wakeup)
mutex_t lk;
int n, depth = 0;
queue_t producer_waiting_list, consumer_waiting_list;
void produce() {
while(1) {
retry:
mutex_lock(&lk);
int ready = (depth < n);
if (!ready) {
mutex_unlock(&lk);
wait(&producer_waiting_list); // 阻塞生产者
goto retry;
}
printf("(");
depth++;
// 缓冲区从空变为非空,可能需要唤醒消费者
wakeup(&consumer_waiting_list);
mutex_unlock(&lk);
}
}
void consume() {
while(1) {
retry:
mutex_lock(&lk);
int ready = (depth > 0);
if (!ready) {
mutex_unlock(&lk);
wait(&consumer_waiting_list); // 阻塞消费者
goto retry;
}
printf(")");
depth--;
// 缓冲区从满变为未满,可能需要唤醒生产者
wakeup(&producer_waiting_list);
mutex_unlock(&lk);
}
}- 旧有的问题:唤醒丢失(Lost Wakeup)。考虑生产者 P 和消费者 C:
- C 检查
depth > 0,发现为 false。 - 在 C 调用
wait之前,发生上下文切换。 - P 执行,增加
depth,调用wakeup(&consumer_waiting_list)。但此时 C 还没睡,唤醒信号丢失。 - C 恢复执行,调用
wait进入睡眠,可能永远不会被唤醒。
- C 检查
sequenceDiagram participant C as 消费者 participant OS as 操作系统 participant P as 生产者 C->>C: mutex_lock() C->>C: check depth (== 0) -> ready = false Note right of C: 在 wait() 前发生上下文切换 P->>P: mutex_lock() P->>P: 生产,depth++ P->>OS: wakeup(consumer_list) Note left of OS: 无消费者在等待,唤醒丢失 P->>P: mutex_unlock() Note left of C: 上下文切换回消费者 C->>OS: wait(consumer_list) Note right of C: 沉睡,可能永远不会被唤醒 OS-->>C: Blocked为了解决唤醒丢失,需要一种机制能原子地完成「释放锁并进入睡眠」的操作。这引出了条件变量。
- 旧有的问题:唤醒丢失(Lost Wakeup)。考虑生产者 P 和消费者 C:
条件变量(Condition Variable)
条件变量(Condition Variable, CV)是一种同步原语,它允许线程在某个条件不满足时原子地阻塞,并等待该条件被其他线程改变后发出信号而被唤醒。条件变量总是与一个互斥锁关联使用,以保护共享状态(即「条件」)。
条件变量
条件变量本身不存储条件的状态(它没有记忆),它只提供阻塞和唤醒的机制。条件的判断需要程序员显式地在代码中进行。
核心操作
cond_wait(cond_t *cv, mutex_t *lk)- 原子操作:
- 释放传入的互斥锁
lk。 - 将当前线程加入条件变量
cv的等待队列,并使其阻塞。
- 释放传入的互斥锁
- 唤醒后:当线程被唤醒时,
cond_wait会在返回前重新获取互斥锁lk。 - 前提:调用
cond_wait时,必须已经持有互斥锁lk。
- 原子操作:
cond_signal(cond_t *cv)- 唤醒至少一个(通常是一个)正在
cond_wait(cv, ...)上等待的线程。 - 如果没有线程在等待
cv,则此操作无效(信号不会被「保存」)。 - 建议:调用
cond_signal时通常也应持有与cv关联的互斥锁lk,以确保状态修改和信号发送之间的一致性。
- 唤醒至少一个(通常是一个)正在
cond_broadcast(cond_t *cv)- 唤醒所有正在
cond_wait(cv, ...)上等待的线程。 - 同样,建议在持有锁时调用。
- 唤醒所有正在
POSIX API
POSIX 线程库 (pthread) 提供了标准的条件变量 API:
1 |
|
基于 Futex 的简易实现
条件变量可以通过 Linux 的 futex 系统调用实现,以避免唤醒丢失。futex 允许在用户空间进行快速检查,仅在需要阻塞或唤醒时才陷入内核。
1 | // 简化的概念性实现(可能存在整数溢出等问题) |
关键点在于,futex_wait 的原子检查机制确保了即使在 mutex_unlock 和 futex_wait 调用之间发生了 cond_signal(它会改变 cv->value),futex_wait 也会检测到这种变化并立即返回,从而避免了唤醒丢失。
Signal 语义:Hansen/Mesa vs. Hoare
cond_signal 的行为细节,特别是唤醒线程和锁的交接方式,存在两种主要语义:
-
Hansen/Mesa 语义(常用,如 POSIX, Java)
cond_signal只是将一个等待线程从等待队列移动到就绪队列,并不保证该线程立即运行,也不直接传递锁。- 发出
signal的线程继续持有锁并执行,直到它释放锁。 - 被唤醒的线程需要重新竞争获取互斥锁,当它最终获得锁并从
cond_wait返回时,不能保证之前等待的条件仍然满足(因为其他线程可能在此期间运行并改变了状态)。
sequenceDiagram participant T_Signal as 发信号线程(T1) participant T_Wait as 等待线程(T2) participant Mutex as 互斥锁 participant CV as 条件变量 T_Wait->>Mutex: 加锁 T_Wait->>CV: cond_wait(cv, mutex) Mutex-->>T_Wait: 解锁(由 wait 隐式完成) CV-->>T_Wait: 阻塞 T_Signal->>Mutex: 加锁 T_Signal->>T_Signal: 修改共享状态 T_Signal->>CV: cond_signal(cv) CV-->>T_Wait: 将 T2 从等待队列移动到就绪队列 T_Signal->>T_Signal: 保持锁并继续执行 T_Signal->>Mutex: 解锁 Note over T_Wait: T2 竞争互斥锁 T_Wait->>Mutex: 加锁(当被调度且成功时) Mutex-->>T_Wait: 获得锁 CV-->>T_Wait: cond_wait 返回 T_Wait->>T_Wait: 重新检查条件! -
Hoare 语义(理论上简洁,实现复杂)
cond_signal立即将锁和 CPU 控制权从发信号的线程(T1)转移给被唤醒的线程(T2)。- T1 阻塞,直到 T2 执行完毕并释放锁(或者 T2 再次调用
cond_wait)时,锁和控制权才交还给 T1。 - 优点:当 T2 从
cond_wait返回时,可以保证其等待的条件仍然满足(因为没有其他线程能在这期间运行)。 - 缺点:实现复杂,需要调度器进行特殊处理,可能导致更多的上下文切换。
sequenceDiagram participant T_Signal as 发信号线程(T1) participant T_Wait as 等待线程(T2) participant Mutex as 互斥锁 participant CV as 条件变量 T_Wait->>Mutex: 加锁 T_Wait->>CV: cond_wait(cv, mutex) Mutex-->>T_Wait: 解锁(由 wait 隐式完成) CV-->>T_Wait: 阻塞 T_Signal->>Mutex: 加锁 T_Signal->>T_Signal: 改变共享状态 T_Signal->>CV: cond_signal(cv) Note over T_Signal, T_Wait: 原子地转移锁和 CPU 控制权 Mutex-->>T_Wait: (从 T1)获取锁 CV-->>T_Wait: cond_wait 返回 T_Signal-->>T_Signal: T1 阻塞 T_Wait->>T_Wait: 执行临界区(条件成立) T_Wait->>Mutex: 解锁 Note over T_Signal, T_Wait: 将锁和控制权还给 T1 Mutex-->>T_Signal: (从 T2)获取锁 T_Signal-->>T_Signal: T1 恢复
现实世界的选择
由于实现简单且对调度器的要求较低,Hansen/Mesa 语义是现代操作系统和编程语言(如 POSIX, Java)的普遍选择。这意味着使用这些系统的条件变量时,必须遵循特定的编程模式。
Hansen/Mesa 语义下的正确用法:while 循环
由于 Mesa 语义下,线程被唤醒时不保证条件仍然满足,因此必须在 cond_wait 返回后重新检查条件。这通常通过将 cond_wait 放在 while 循环中实现:
1 | // 正确模式(Mesa 语义) |
原因:
- 虚假唤醒(Spurious Wakeup):某些实现可能在没有
signal的情况下唤醒线程。 - 信号时机:在你被唤醒和重新获得锁之间,其他线程可能已经运行并再次改变了条件。
broadcast:如果使用cond_broadcast,多个线程被唤醒,但只有一个(或少数几个)线程的条件可能真正满足。
经验法则
在 Mesa 语义下,cond_wait 必须始终在 while 循环中调用。
生产者-消费者问题的条件变量解决方案
现在我们可以使用条件变量和 while 循环模式来正确解决生产者-消费者问题。
方案 1:使用两个条件变量
为生产者(等待缓冲区非满)和消费者(等待缓冲区非空)分别使用不同的条件变量,可以更精确地唤醒目标线程。
1 | mutex_t lk = MUTEX_INIT(); |
- 优点:
signal的目标明确,只唤醒需要被唤醒的角色(生产者唤醒消费者,消费者唤醒生产者)。 - 缺点:需要管理两个条件变量。
方案 2:使用单个条件变量和 broadcast
使用一个条件变量,并在状态改变时唤醒所有等待者。
1 | mutex_t lk = MUTEX_INIT(); |
- 优点:实现相对简单,只需一个 CV。
- 缺点:可能导致不必要的唤醒(例如,生产者唤醒了其他生产者,但缓冲区仍然是满的)。由于
while循环的存在,这些被错误唤醒的线程会再次检查条件并继续等待,因此正确性不受影响,但可能带来性能开销(所谓的 thundering herd 问题)。
单 CV + signal 的陷阱
如果只用一个 CV 并且使用 cond_signal,可能会出现问题。考虑缓冲区大小为 1,两个消费者 C1, C2 和一个生产者 P1:
- C1, C2 发现缓冲区为空,调用
cond_wait(&cv, &lk)阻塞。 - P1 生产一个 item,调用
cond_signal(&cv)。假设 C1 被唤醒。 - 在 C1 重新获取锁之前,P1 再次运行,发现缓冲区已满 (depth=1),调用
cond_wait(&cv, &lk)阻塞。 - C1 获取锁,消费 item,
depth变为 0。C1 调用cond_signal(&cv)。 - 问题:此时等待队列中有 P1 (需要
depth < 1) 和 C2 (需要depth > 0)。如果signal唤醒了 C2,C2 会发现depth == 0并再次wait。而 P1 则永远等待下去,导致死锁。

使用两个 CV 或使用 `broadcast` 可以避免此问题。
条件变量使用法则
- 必须有关联的互斥锁:保护共享状态(条件)。
- 必须有共享状态:用于判断条件是否满足。
wait/signal/broadcast时必须持有锁。(wait内部会原子释放和重获锁)wait必须在while循环内(Mesa 语义)。- 优先为不同条件使用不同 CV,除非
broadcast是明确需要或更简单的选择。
应用:协调计算依赖
条件变量的 wait/signal 机制非常适合用于实现计算依赖关系(happens-before)。
- 计算图:可以将一个复杂的计算任务表示为一个有向无环图(DAG),其中节点 代表计算任务(事件),边 表示任务 依赖于任务 的结果( happens-before )。
- 并行化:没有依赖关系(图中没有路径相连)的任务可以并行执行。
通用并行化方案
- 为每个计算节点 分配一个线程(或将其视为一个待调度任务)。
- 等待条件:节点 开始计算前,必须
wait直到所有前驱节点 (即存在边 ) 都已完成。 - 完成信号:节点 完成计算后,需要
signal(或broadcast)通知所有后继节点 (即存在边 ),告知它们依赖的条件可能已满足。
示例:并行化动态规划
动态规划算法通常涉及计算子问题的最优解,子问题之间存在依赖关系,形成一个 DAG。
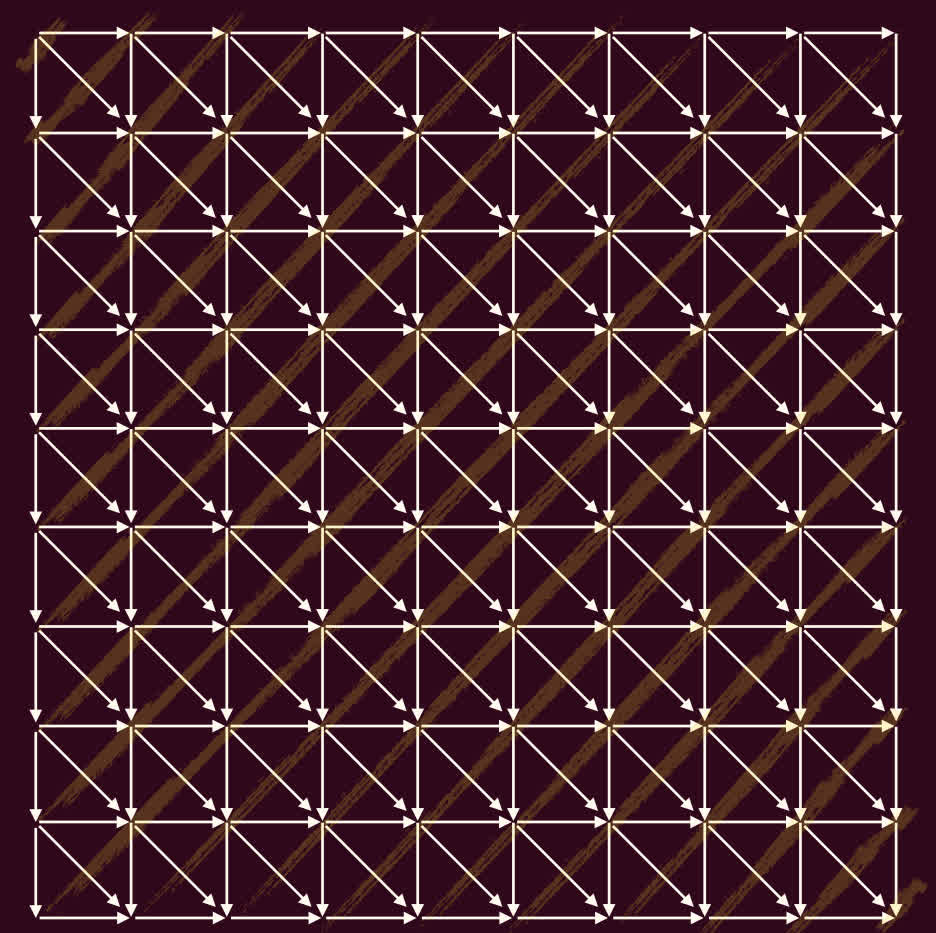
编辑距离计算将字符串 A 转换为字符串 B 所需的最少编辑操作(插入、删除、替换)次数。有递推公式:dist(i, j) 依赖于 dist(i-1, j), dist(i, j-1), dist(i-1, j-1)。
- 单线程:通常按行、按列或按对角线(拓扑序)计算。
- 多线程:观察到同一条反斜线(
i + j = const)上的所有dist(i, j)可以并行计算,因为它们只依赖于上一条反斜线i + j - 1和i + j - 2上的结果。- 可以为每条反斜线(或每个节点)创建一个任务/线程。
- 使用条件变量(或信号量)来同步:计算
dist(i, j)的线程需要等待计算dist(i-1, j),dist(i, j-1),dist(i-1, j-1)的线程完成。完成后,发出信号。
通用并发设计框架:调度器-工作者
一种常见的并发模式是将任务调度和执行分离:
- 调度器线程(生产者):维护计算图(或任务列表)和依赖关系。根据已完成的任务,找出当前可以运行的任务(满足依赖条件),将它们放入一个就绪队列,并
signal工作者线程。 - 工作者线程(消费者):从就绪队列中取出任务并执行。执行前可能需要
wait等待调度器的信号(如果队列为空)。执行完成后,通知调度器任务已完成(可能通过signal或更新共享状态)。这类似于线程池(Thread Pool)模型。
1 | // 概念代码 |
复杂示例:打印 fish
- 任务:有三种线程,分别无限打印
<,>,-。需要同步它们,使得屏幕交替打印<><_和><>_的组合序列。 - 分析:这是一个状态同步问题。打印哪个字符取决于当前处于哪个状态。可以用有限状态机(FSM)来描述合法的前缀。还没学所以略。
信号量(Semaphore)
信号量(Semaphore)是 Dijkstra 在 1965 年提出的另一种强大的同步原语。与条件变量不同,信号量包含一个内部状态:一个非负整数值。
信号量
信号量是一个整数变量,只能通过两个原子操作来访问和修改:
P(sem)(来自「荷兰语」[^dutch] prolaag,尝试减少),也称为wait(),down(),acquire()V(sem)(来自荷兰语 verhoog,增加),也称为signal(),up(),post(),release()
核心操作
P(sem_t *sem)或sem_wait(sem_t *sem)- 原子地:
- 检查信号量
sem的值。 - 如果
sem > 0,则将其减 1,操作完成,线程继续执行。 - 如果
sem <= 0,则线程阻塞,直到其他线程调用V(sem)使其值变为正数。
- 检查信号量
- 原子地:
V(sem_t *sem)或sem_post(sem_t *sem)- 原子地:
- 将信号量
sem的值加 1。 - 如果此时有线程因
P(sem)而阻塞在该信号量上,则唤醒其中一个线程。
- 将信号量
- 原子地:
POSIX API
1 |
|
基于互斥锁和条件变量的实现
信号量的行为可以用互斥锁和条件变量来模拟:
1 | typedef struct { |
注意:sem_post 只需要 cond_signal 而不是 broadcast,因为 P 操作每次只消耗一个单位的「资源」,唤醒一个线程就足够了。while 循环在 sem_wait 中仍然是必要的,以处理虚假唤醒和保证条件的正确检查。
信号量的用途与「整数」理解
信号量的整数值可以被赋予不同的含义,从而实现不同的同步模式:
-
互斥
- 将信号量初始化为
1。 P(sem):获取锁(资源数为 1,只有一个线程能成功 P 操作)。V(sem):释放锁(将资源数恢复为 1)。
1
2
3
4
5
6
7
8
9sem_t mutex;
sem_init(&mutex, 0, 1); // 初始化为 1
void critical_section_example() {
sem_wait(&mutex); // 进入临界区(P)
// ... 临界区代码 ...
sem_post(&mutex); // 退出临界区(V)
// ... 剩余区代码 ...
} - 将信号量初始化为
-
顺序控制(Ordering/Happens-Before)
- 将信号量初始化为
0。 - 线程 A 在完成某个操作后调用
V(sem)。 - 线程 B 在需要等待 A 完成时调用
P(sem)。由于初始值为 0,B 会阻塞,直到 A 调用V使值变为 1。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19sem_t order_sem;
sem_init(&order_sem, 0, 0); // 初始化为 0
// 线程 T2(子线程)
void* child(void *arg) {
do_something_first();
sem_post(&order_sem); // V 操作:通知 T1 我已完成
return NULL;
}
// 线程 T1(主线程)
int main() {
pthread_t c;
create_thread(&c, child);
// ... 其他操作 ...
sem_wait(&order_sem); // P 操作:等待 T2 完成
do_something_after_child();
return 0;
} - 将信号量初始化为
-
通用资源计数(Counting Semaphore)
- 将信号量初始化为可用资源的数量
N。 P(sem):请求/获取一个资源。如果value > 0,则资源可用,value减 1;否则阻塞等待。V(sem):释放/归还一个资源。value加 1,并可能唤醒一个等待资源的线程。- 这正是生产者-消费者问题中缓冲区空位和数据项数量的抽象。
- 将信号量初始化为可用资源的数量
利用信号量解决生产者-消费者问题
信号量提供了一种非常自然和简洁的方式来解决生产者-消费者问题。
empty信号量:表示缓冲区中空闲槽位的数量,初始值为MAX(缓冲区容量)。生产者 P 此信号量。full信号量:表示缓冲区中已填充数据的数量,初始值为0。消费者 P 此信号量。mutex信号量(或互斥锁):用于保护对缓冲区的互斥访问,初始值为1。
1 |
|
死锁陷阱:错误的加锁顺序
如果在消费者(或生产者)中颠倒 P(full) 和 P(mutex) 的顺序:
1
2
3
4// 错误顺序 - 可能导致死锁
sem_wait(&mutex); // 先获取互斥锁
sem_wait(&full); // 再等待数据项
// …
死锁场景:
- 消费者 C 运行,获取
mutex锁。 - C 尝试
sem_wait(&full),但缓冲区为空(full值为 0),C 阻塞,但仍然持有mutex锁。 - 生产者 P 运行,尝试
sem_wait(&mutex)以访问缓冲区放入数据,但mutex已被 C 持有,P 阻塞。 - C 等待 P 生产数据(
V(full)),P 等待 C 释放mutex。死锁发生。
正确做法:总是先获取表示资源可用性(empty 或 full)的信号量,再获取用于互斥访问(mutex)的信号量/锁。
P/V 操作后的代码保护
在上面基于互斥锁和条件变量的信号量实现中,sem_wait 和 sem_post 内部使用了锁,但在函数返回时锁已经释放。因此,紧跟在 sem_wait 或 sem_post 调用之后的代码并不受该信号量内部锁的保护。如果这些代码需要访问共享资源(如生产者-消费者例子中的 buffer),则必须使用额外的互斥锁(如 mutex 信号量)来保护。
信号量的局限性
虽然信号量很强大,但在某些复杂场景下可能不如条件变量灵活:
- 复杂条件:信号量只能表示整数状态。对于涉及多个变量或非整数条件的判断(如 fish 例子中的状态转移),使用条件变量配合显式状态检查通常更清晰。
- 唤醒目标:
V操作通常只唤醒一个等待者,且无法精确指定唤醒哪种类型的等待者(如果多种线程等待同一个信号量)。条件变量可以通过使用不同的 CV 来区分等待条件和唤醒目标。例如,在单 CV +signal的生产者-消费者陷阱中,信号量也可能遇到类似问题(消费者 V 操作唤醒了另一个消费者而不是生产者)。
总结
| 特性 | 条件变量(Condition Variable) | 信号量(Semaphore) |
|---|---|---|
| 内部状态 | 无(无记忆) | 非负整数(有记忆) |
| 核心操作 | wait, signal, broadcast |
P(wait/down), V(post/up) |
| 关联锁 | 必须与互斥锁配合使用 | 可独立使用,或与互斥锁配合 |
| 条件检查 | 程序员必须在 while 循环中显式检查共享状态 |
P 操作隐式检查 value > 0 |
| 唤醒 | signal 唤醒一个,broadcast 唤醒所有 |
V 操作唤醒一个 |
| 主要用途 | 等待任意复杂条件满足、协调线程执行 | 互斥、顺序控制、资源计数 |
| 灵活性 | 更高,适用于复杂条件 | 相对较低,主要用于计数和简单同步 |
| 易用性 | 模式固定(while 循环),但概念稍复杂 |
概念直接(资源获取/释放),但易因顺序错误死锁 |
选择哪种同步原语取决于具体问题的需求。对于简单的互斥、顺序控制或资源计数,信号量通常更简洁。对于需要等待复杂条件或需要更精细唤醒控制的场景,条件变量通常是更好的选择。